In this project, a foot-controlled bionic / prosthetic arm is developed. A sandal is retrofitted with pushbuttons and inertial measurement unit (IMU) sensors, which capture the movement of the foot, and communicate wirelessly with the arm controller to actuate the hand and wrist. Actuators are placed in the forearm and actuate the fingers via tendon cables or strings.
A unique feature of the design is the 2 degrees of freedom control of the wrist, which involves flexion-extension and pronation-supination movements, whilst having independent finger and thumb control at the same time. The actuation design of the thumb resembles a human thumb, where it is capable of adduction-abduction movement.
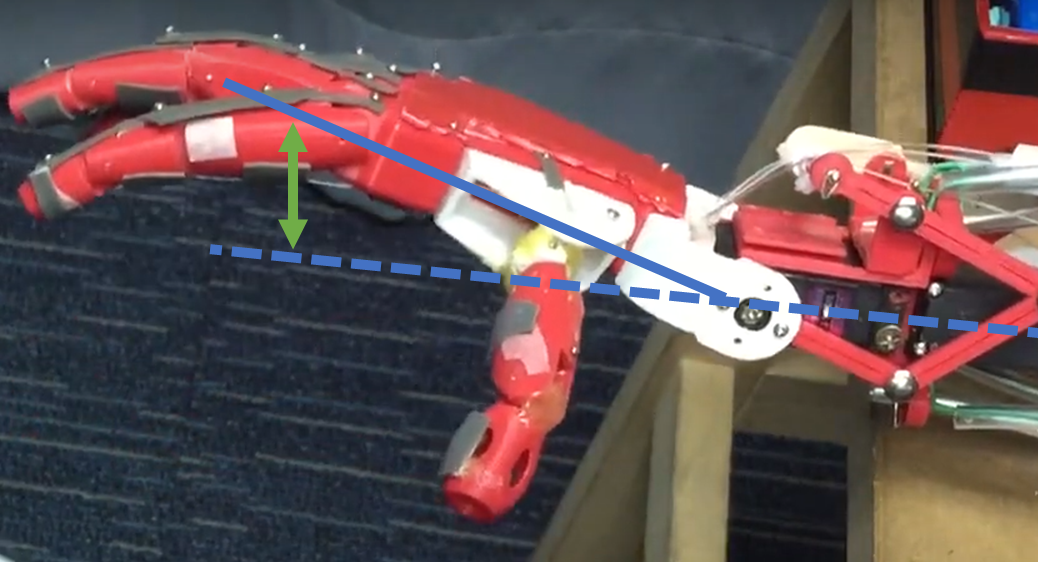
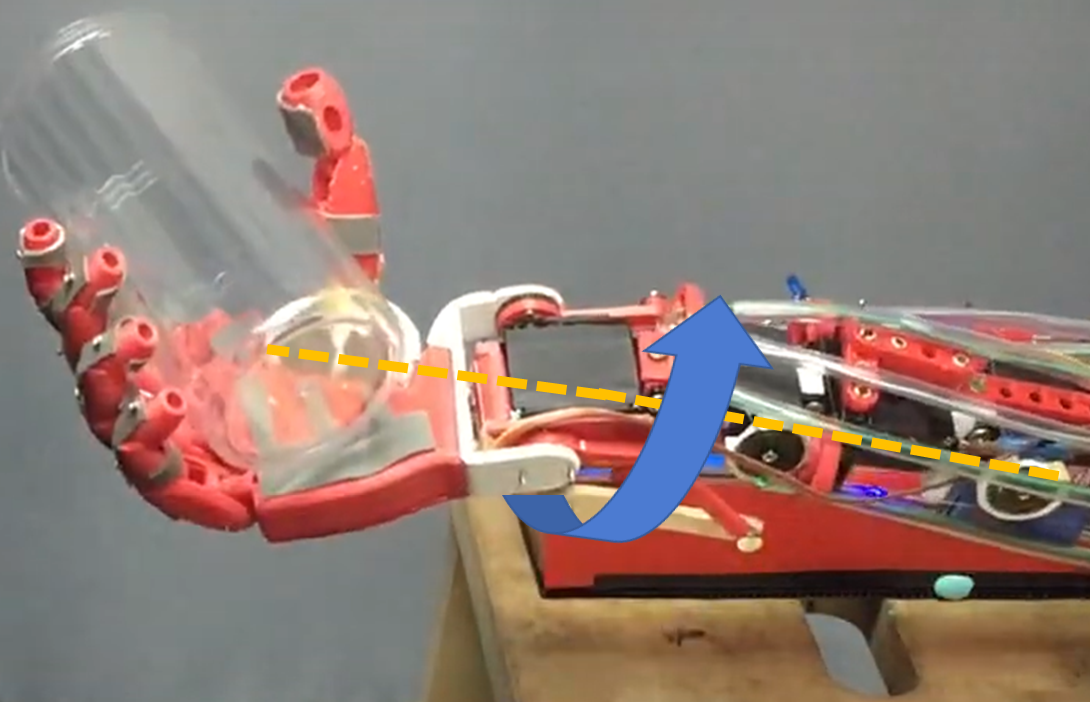
Flexion
Extension
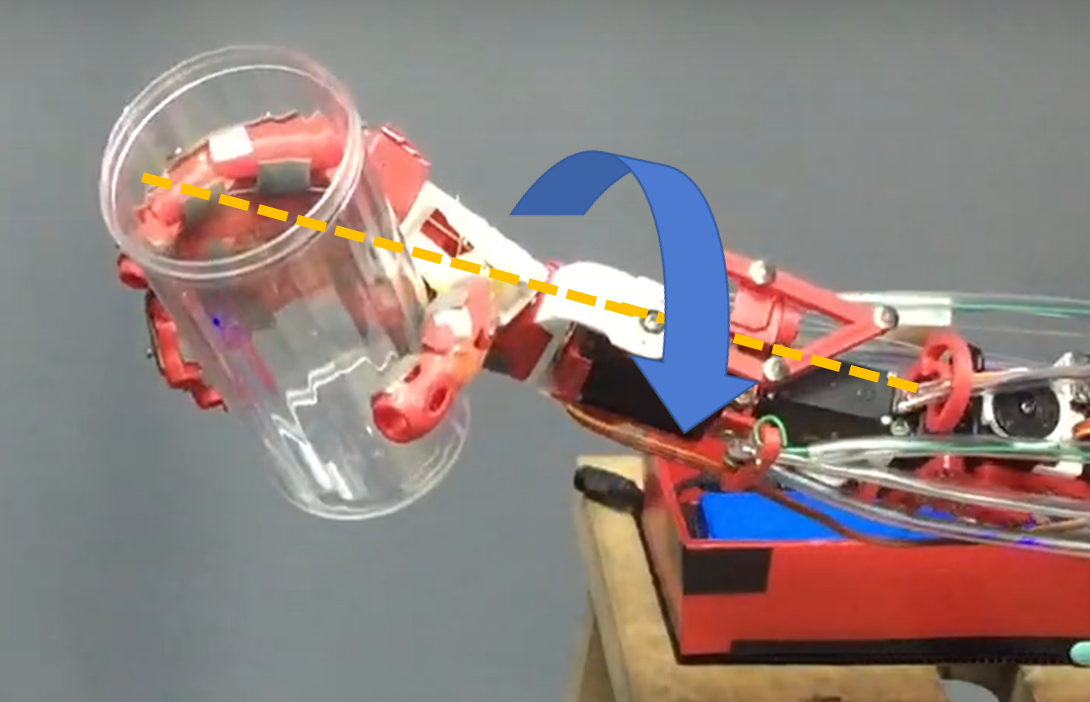
Pronation
Supination
Adduction
Abduction
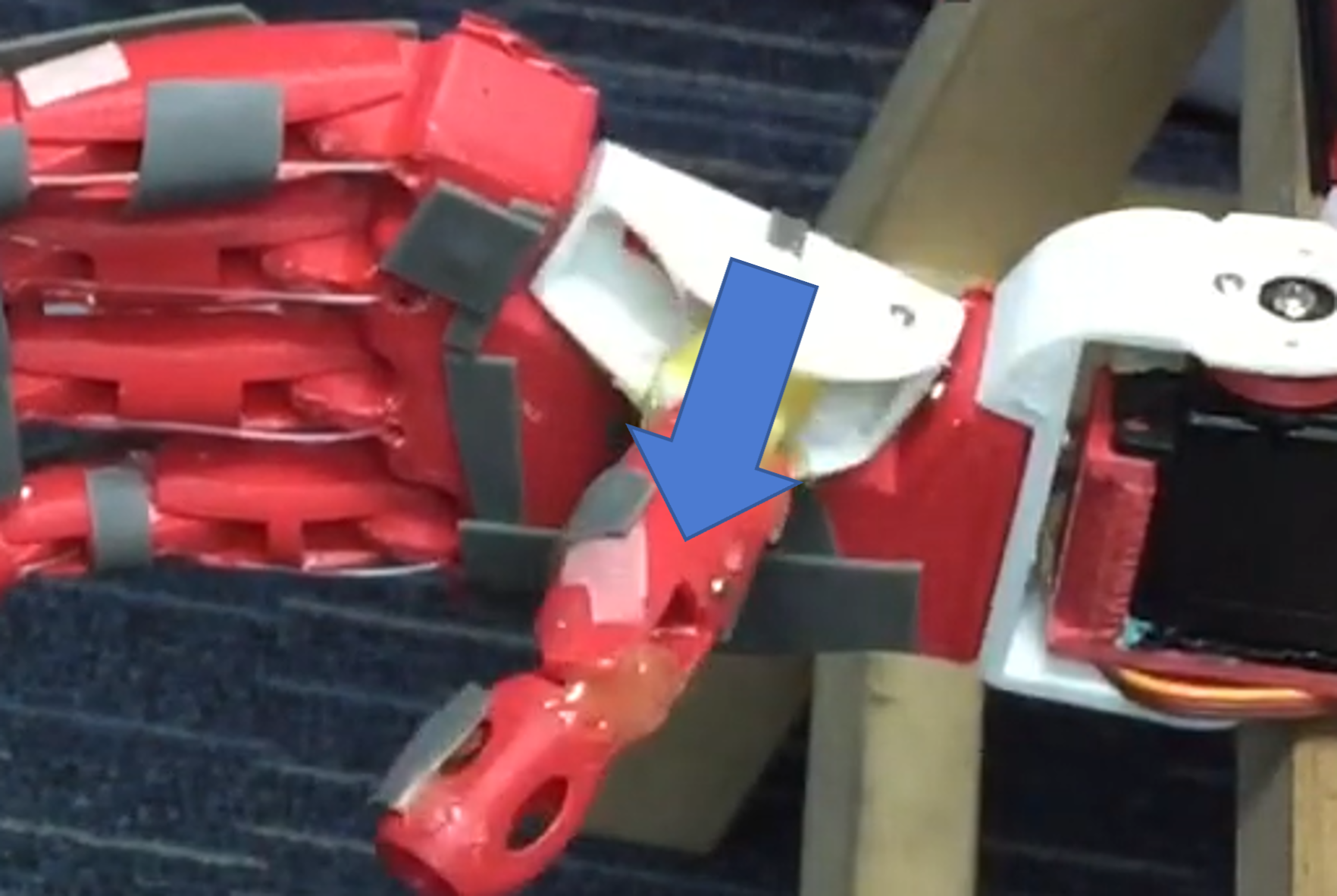
Besides that, the forearm is designed to have the appearance of muscle and bone structure support with plastic rods, which also provide lightweight and compliance advantages. In addition, the passive compliant joints in the hand allow for conforming grasps and shock tolerance.
This project was undertaken by a group of interns from Tunku Abdul Rahman University College, Malaysia.